Illustrator鼠绘教程:漂亮质感机器人Eve |
|
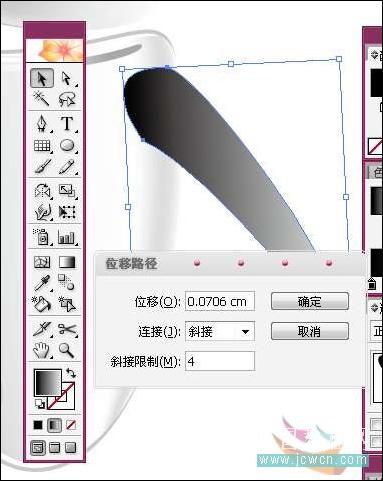
三、机器人附件制作 1、使用钢笔工具,绘制手臂外形,填充100-14%渐变 。如图:
2、保持对象被选中的状态,选择 "对象"-"路径"-"偏移路径",位移2PT 。
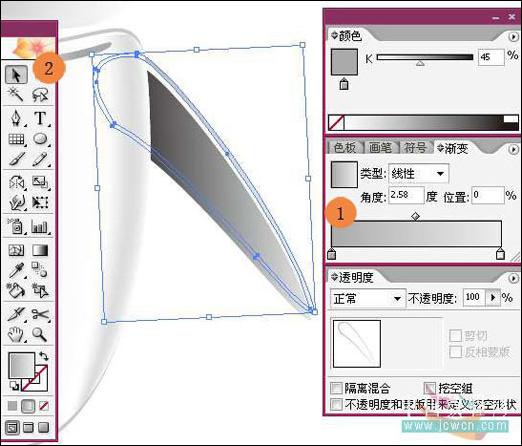
3、设置渐变为45-10% 。可视需要,更改透明度 。
|
|
技术文章快速查找
|
|
|
相关下载
|
|
|
|
在线教程导航
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||